OVS Deep Dive 1: vswitchd
In this OVS Deep Dive series, I will walk through the Open vSwtich source code to look into the core designs and implementations of OVS. The code is based on ovs 2.6.1.
1. vswitchd Overview
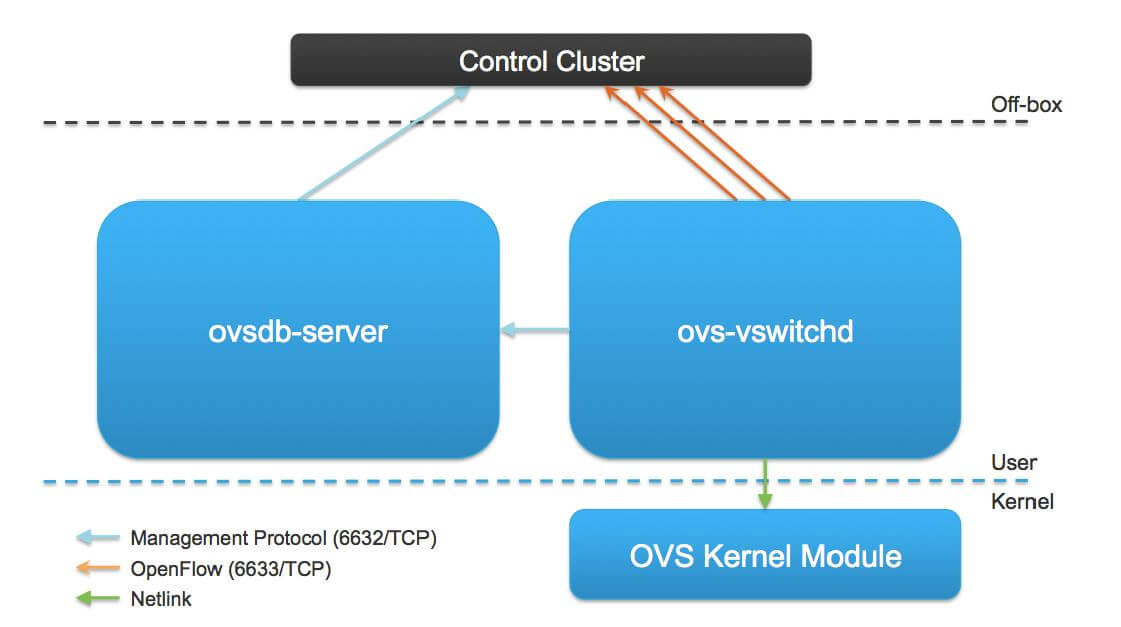
Fig.1. OVS Architecture (image source NSRC[1])
As depicted in Fig.1, ovs-vswitchd sits in the key position of OVS, which
needs to interact with OpenFlow controller, OVSDB, and kernel module.
- Core components in the system
- communicate with outside world using
OpenFlow - communicate with ovsdb-server using
OVSDB protocol - communicate with kernel over
netlink - communicate with system through
netdevabstract interface
- communicate with outside world using
- Implements mirroring, bonding, and VLANs
- CLI Tools:
ovs-ofctl,ovs-appctl
The following diagram reveals more details:
+-------------------+
| ovs-vswitchd |<-->ovsdb-server
+-------------------+
| ofproto |<-->OpenFlow controllers
+--------+-+--------+
| netdev | | ofproto|
+--------+ |provider|
| netdev | +--------+
|provider|
+--------+
Here, the vswitch module is further devided into submodules/libraies:
ovs-vswitchd:vswitchddaemonofproto: library which abstracts ovs bridgeofproto-provider: interface to control an specific kind of OpenFlow switchnetdev: library which abstracts network devicesnetdev-provider: OS- and hardware-specific interface to network devices
We explain these concepts and data structures in following sections.
2. Key Data Structures
_
| +-------------------+
| | ovs-vswitchd |<-->ovsdb-server
| +-------------------+
| | ofproto |<-->OpenFlow controllers
| +--------+-+--------+ _
| | netdev | |ofproto-| |
userspace | +--------+ | dpif | |
| | netdev | +--------+ |
| |provider| | dpif | |
| +---||---+ +--------+ |
| || | dpif | | implementation of
| || |provider| | ofproto provider
|_ || +---||---+ |
|| || |
_ +---||-----+---||---+ |
| | |datapath| |
kernel | | +--------+ _|
| | |
|_ +--------||---------+
||
physical
NIC
Fig.2.1. OVS Internal Architecture [2]
An OVS bridges manages two types of resources:
- the forwarding plane it controls (
datapath) - the (physical and virtual) network devices attached to it (
netdev)
Key data structures:
-
OVS bridge implementation
ofproto,ofproto-provider -
for
datapathmanagementdpif,dpif-provider -
for network devices management
netdev,netdev-provider
We explain them, respectively.
2.1 ofproto
struct ofproto abstracts OpenFlow switches.
An ofproto instance is just an OpenFlow switch (bridge).
Data Structures (ofproto/ofproto-provider.h):
struct ofproto: represents an OpenFlow switch (ovs bridge), all flow/port operations are done on the ofprotostruct ofport: represents a port within an ofprotostruct rule: represents an OpenFlow flow within an ofprotostruct ofgroup: represents an OpenFlow 1.1+ group within an ofproto
/* An OpenFlow switch. */
struct ofproto {
const struct ofproto_class *ofproto_class;
char *type; /* Datapath type. */
char *name; /* Datapath name. */
/* Settings. */
uint64_t fallback_dpid; /* Datapath ID if no better choice found. */
uint64_t datapath_id; /* Datapath ID. */
/* Datapath. */
struct hmap ports; /* Contains "struct ofport"s. */
struct simap ofp_requests; /* OpenFlow port number requests. */
uint16_t max_ports; /* Max possible OpenFlow port num, plus one. */
/* Flow tables. */
struct oftable *tables;
/* Rules indexed on their cookie values, in all flow tables. */
/* List of expirable flows, in all flow tables. */
/* OpenFlow connections. */
/* Groups. */
/* Tunnel TLV mapping table. */
};
/* An OpenFlow port within a "struct ofproto".
*
* The port's name is netdev_get_name(port->netdev).
*/
struct ofport {
struct hmap_node hmap_node; /* In struct ofproto's "ports" hmap. */
struct ofproto *ofproto; /* The ofproto that contains this port. */
struct netdev *netdev;
struct ofputil_phy_port pp;
ofp_port_t ofp_port; /* OpenFlow port number. */
uint64_t change_seq;
long long int created; /* Time created, in msec. */
int mtu;
};
2.2 ofproto-provider
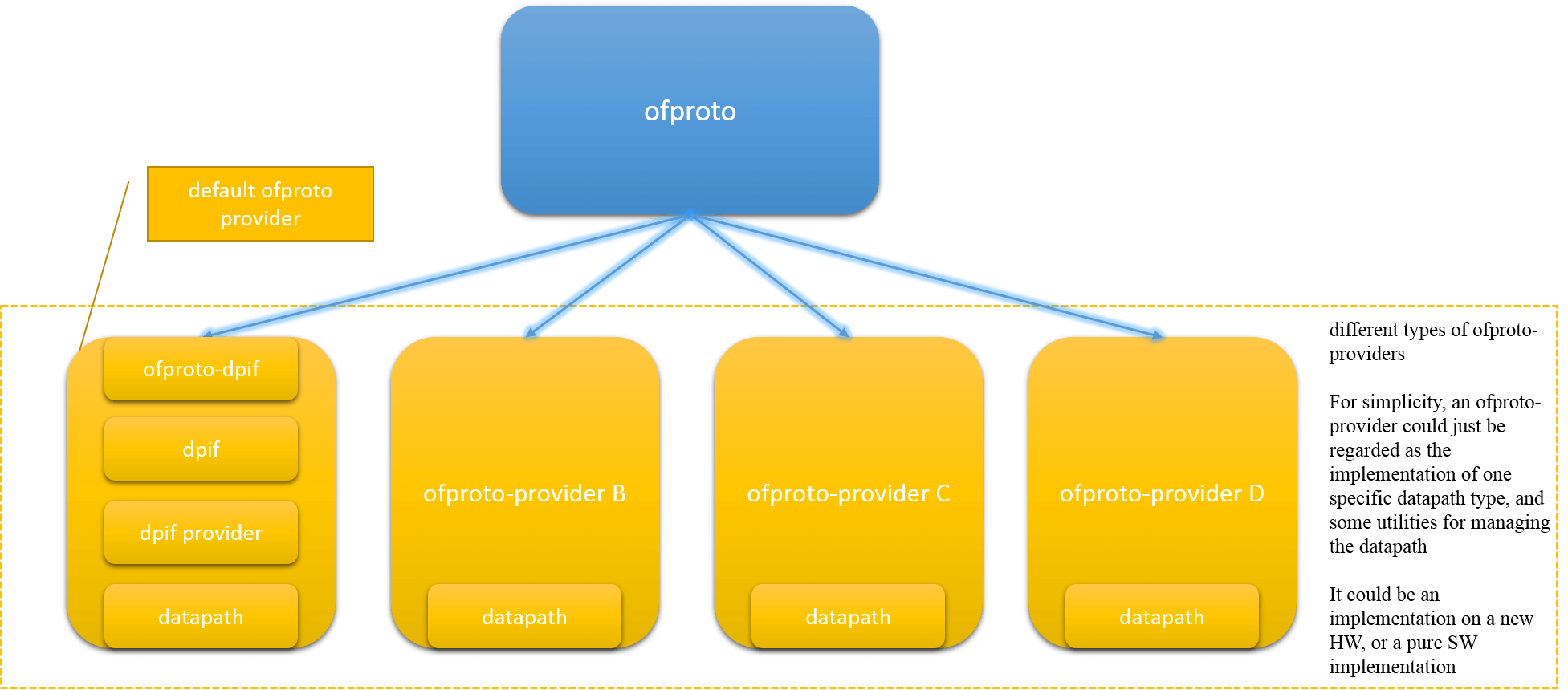
Fig.2.1. OVS Providers
ofproto class structure, to be defined by each ofproto (ovs bridge) implementation.
An ofproto provider is what ofproto uses to directly monitor and control
an OpenFlow-capable switch. struct ofproto_class, in ofproto/ofproto-provider.h,
defines the interfaces to implement an ofproto provider for new hardware or software.
Open vSwitch has a built-in ofproto provider named ofproto-dpif, which
is built on top of a library for manipulating datapaths, called dpif.
A “datapath” is a simple flow table, one that is only required to support
exact-match flows, that is, flows without wildcards. When a packet arrives on
a network device, the datapath looks for it in this table. If there is a
match, then it performs the associated actions. If there is no match, the
datapath passes the packet up to ofproto-dpif, which maintains the full
OpenFlow flow table. If the packet matches in this flow table, then
ofproto-dpif executes its actions and inserts a new entry into the dpif flow
table. (Otherwise, ofproto-dpif passes the packet up to ofproto to send the
packet to the OpenFlow controller, if one is configured.)
The “dpif” library in turn delegates much of its functionality to a “dpif provider”. Fig.2.1 shows how dpif providers fit into the Open vSwitch architecture.
2.3 netdev
The Open vSwitch library, defined in lib/netdev-provider.h, implemented in
lib/netdev.c, that abstracts interacting with
network devices, that is, Ethernet interfaces.
Every port on a switch must have a corresponding netdev that must minimally support a few operations, such as the ability to read the netdev’s MTU, get the number of RX and TX queues.
The netdev library is a thin layer over “netdev provider” code, explained further below.
2.4 netdev-provider
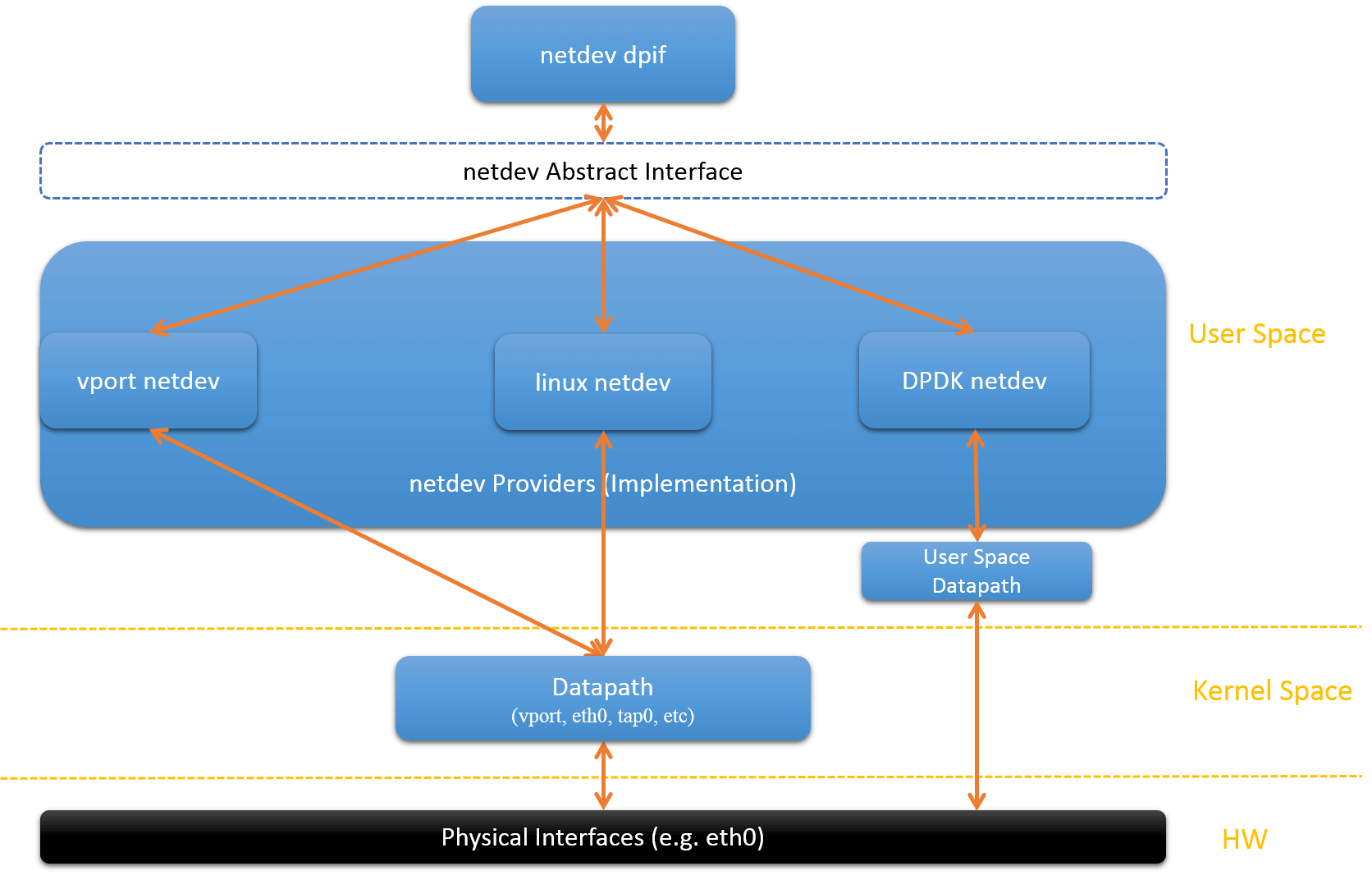
Fig.2.2. netdev providers
A netdev provider implements an OS- and hardware-specific interface to “network devices”, e.g. and ethernet device. Open vSwitch must be able to open each port on a switch as a netdev, so you will need to implement a “netdev provider” that works with your switch hardware and software.
Fig.2.2 depicts the netdev and netdev providers in OVS. The detailed
netdev provider types are listed below:
All types of netdev classes:
- linux netdev (
lib/netdev-linux.c, for linux platform)system-netdev_linux_classtap-netdev_tap_classinternal-netdev_internal_class
- bsd netdev (
lib/netdev-bsd.c, for bsd platform)system-netdev_bsd_classtap-netdev_tap_class
- windows netdev (for windows platform)
system-netdev_windows_classinternal-netdev_internal_class
- dummy netdev (
lib/netdev-dummy.c)dummy-dummy_classdummy-internal-dummy_internal_classdummy-pmd-dummy_pmd_class
- vport netdev (
lib/netdev-vport.c, a vport holds a reference to a port in datapath, the latter could be opened withnetdev_open())- tunnel class:
genevegrevxlanlispstt
patch-patch_class
- tunnel class:
- dpdk netdev
dpdk_classdpdk_ring_classdpdk_vhost_classdpdk_vhost_client_class
For example, the community is experimenting running OVS over DPDK, which performs high performance packet processing in userspace. In this solution, the kernel module of OVS will be replaced by the counterparts in DPDK. That means a DPDK netdev must be implemented as the netdev-provider for this platform. If you look at the source code, you will see that’s what exactly been doing at the end of DPDK init code - register it’s netdev provider classes:
void
netdev_dpdk_register(void)
{
netdev_register_provider(&dpdk_class);
netdev_register_provider(&dpdk_ring_class);
netdev_register_provider(&dpdk_vhost_class);
netdev_register_provider(&dpdk_vhost_client_class);
}
The Porting section of the documentation has more information in the “Writing a netdev Provider” section.
3. Call Flows
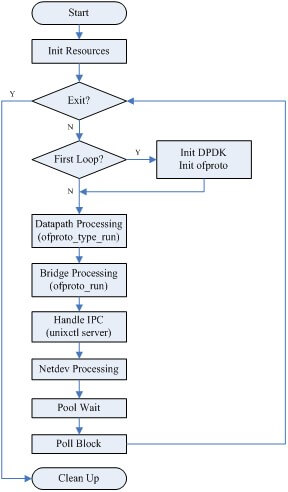
Fig.3.1 vswitchd flow diagram
Entrypoint of vswitchd is in vswitchd/ovs-vswitchd.c.
Logical control diagram of ovs-vswitchd is depicted in Fig.3.1.
At the start, it initializes the bridge module, which is implemented in
vswitchd/bridge.c. The bridge module will retrieve some configuration
parameters from ovsdb.
Then, ovs-vswitchd enters the main loop. In the first iteration of this loop,
it initializes some libraries, include DPDK (if configured), and the most
important, ofproto library. Note that these resources only init once.
Then, each datapath will do its work by running ofproto_type_run(), which will
call into the specific type_run() implementation of that datapath type.
Then, each bridge will do its work by running ofproto_run(), which will call
into the specific run() implementation of ofproto class.
Then, ovs-vswitchd will handle IPC (JSON-RPC) messages, which comes from
command line (ovs-appctl) and ovsdb-server.
Then, netdev_run() is called to process all the various kinds of netdevs.
After all the above work is done, the brige, unixctl server, and netdev modules will enter blocking state until new signals trigger.
Corresponding psudo-code is shown below:
int main()
{
/* step.1. init bridge module, obtain configs from ovsdb */
bridge_init();
/* step.2. deamon loop */
while (!exiting) {
/* step.2.1. process control messages from OpenFlow Controller and CLI */
bridge_run()
|
|--dpdk_init()
|--bridge_init_ofproto() // init bridges, only once
|--bridge_run__()
|
|--for(datapath types):/* Let each datapath type do the work that it needs to do. */
ofproto_type_run(type)
|--for(all_bridges):
ofproto_run(bridge) // handle messages from OpenFlow Controller
unixctl_server_run(unixctl); /* receive control messages from CLI (ovs-appctl <xxx>) */
netdev_run(); /* Performs periodic work needed by all the various kinds of netdevs */
/* step.2.2. wait events arriving */
bridge_wait();
unixctl_server_wait(unixctl);
netdev_wait();
/* step.2.3. block util events arrive */
poll_block();
}
}
We explain some of the most important procedures in the following.
4. Procedures and Submodules
4.1. bridge module init
Let’s see what the bridge_init() really does:
/* Initializes the bridge module, configuring it to obtain its configuration
* from an OVSDB server accessed over 'remote', which should be a string in a
* form acceptable to ovsdb_idl_create(). */
void
bridge_init(const char *remote)
{
/* step.1. Create connection to database. */
idl = ovsdb_idl_create(remote, &ovsrec_idl_class, true, true);
/* step.2. Register unixctl commands. (ovs-appctl <command>) */
unixctl_command_register("qos/show-types", "interface", 1, 1)
...
unixctl_command_register("bridge/dump-flows", "bridge", 1, 1,)
/* step.3. init submodules */
lacp_init(); // register command lacp/show <port>
bond_init(); // register bond commands
cfm_init();
bfd_init();
ovs_numa_init();
stp_init();
lldp_init();
rstp_init();
ifnotifier = if_notifier_create(if_change_cb, NULL);
}
ovs-vswitchd first creates a connection to ovsdb-server using a module
called OVSDB IDL.
IDL is short for Interface Definition Language.
The OVSDB IDL maintains an in-memory replica of a database. It issues RPC
requests to an OVSDB database server and parses the responses, converting
raw JSON into data structures that are easier for clients to digest.
There is more explanations about OVSDB IDL in ovsdb-idl.h.
unixctl_command_register() will register a single unixctl command, which
allow controlling ovs-vswitchd over CLI. Each submodule
calls this method to register its subcommands and expose them to the outside.
As we mentioned in the beginning, the command line tool to interact with
vswitchd is ovs-appctl, so you could verify the those registered commands:
$ ovs-appctl --version
ovs-appctl (Open vSwitch) 2.5.0
Compiled Mar 18 2016 15:00:11
$ ovs-appctl bridge/dump-flows br-int
duration=850872s, n_packets=2828, n_bytes=181182, priority=3,in_port=1,dl_vlan=1003,actions=mod_vlan_vid:1003,NORMAL
duration=868485s, n_packets=3886, n_bytes=222426, priority=1,actions=NORMAL
table_id=23, duration=1019439s, n_packets=0, n_bytes=0, ,actions=drop
$ ovs-appctl qos/show br-int
QoS not configured on br-int
ovs-appctl: ovs-vswitchd: server returned an error
At the end of bridge_init(), some vswitchd submodules are initialized,
including LACP, BOND, CFM, BDF, NUMA, STP, LLDP, RSTP, and inotifiers.
The internal structure of ovs-vswitchd is shown in Fig.4.1.
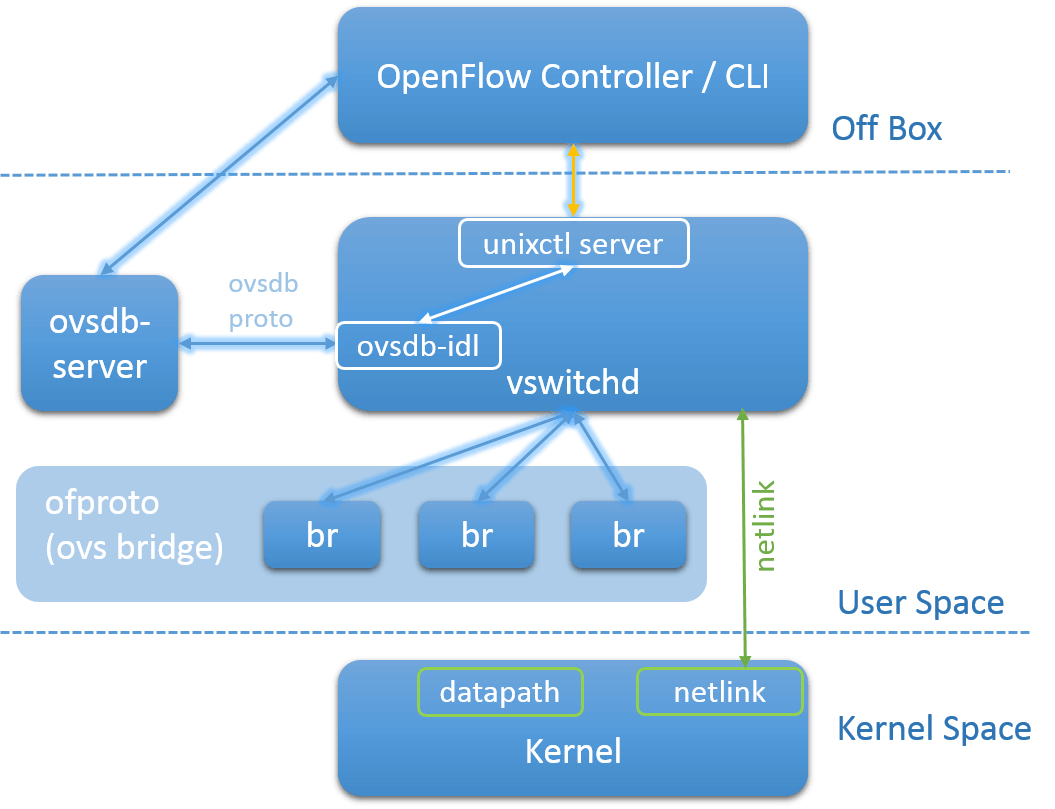
Fig.4.1 vswitchd internal modules
4.2. ofproto library init
ofproto maintains a registered ofproto class array ofproto_classes, in
ofproto/ofproto.c:
288 /* All registered ofproto classes, in probe order. */
289 static const struct ofproto_class **ofproto_classes;
290 static size_t n_ofproto_classes;
291 static size_t allocated_ofproto_classes;
In ofproto_init(), the built in ofproto class ofproto_dpif_class will be
registered, which is defined and implemented in ofproto/ofproto-dpif.c:
const struct ofproto_class ofproto_dpif_class = {
init,
...
port_alloc,
port_construct,
port_destruct,
port_dealloc,
port_modified,
port_query_by_name,
port_add,
port_del,
...
ct_flush, /* ct_flush */
};
The init() method of ofproto_dpif_class will register its unixctl commands:
static void
init(const struct shash *iface_hints)
{
struct shash_node *node;
/* Make a local copy, since we don't own 'iface_hints' elements. */
SHASH_FOR_EACH(node, iface_hints) {
const struct iface_hint *orig_hint = node->data;
struct iface_hint *new_hint = xmalloc(sizeof *new_hint);
new_hint->br_name = xstrdup(orig_hint->br_name);
new_hint->br_type = xstrdup(orig_hint->br_type);
new_hint->ofp_port = orig_hint->ofp_port;
shash_add(&init_ofp_ports, node->name, new_hint);
}
ofproto_unixctl_init(); // register fdb/xxx commands
udpif_init(); // register upcall/xxx commands
}
Let’s test one:
# an ofproto instance is an ovs bridge, so to list all bridges, just issue:
$ ovs-appctl ofproto/list
br-bond
br-int
# you can also get the bridges info by querying ovsdb directly:
$ ovs-vsctl show
f9c76d49-891c-4670-b2fc-75aabca7a1a6
Bridge br-int
fail_mode: secure
Port br-int
Interface br-int
type: internal
Bridge br-bond
Port br-bond
Interface br-bond
type: internal
ovs_version: "2.5.0"
Note that ofproto library only inits once.
4.3. Datapath Processing
TODO: this section needs to refine
After ofproto library is correctly initialized (which means all datapath
types that will be used later have been registered), vswitchd will loop over
the datapath types and let the datapath handle all the things it needs to,
such as, process port changes in this datapath, handle upcall (sending
mis-matched packets to OpenFlow controller). Datapath finishes these
logics by implementing the callback type_run().
For ofproto-dpif - the built in datapath type, the type_run() is implemented
in ofproto/ofproto_dpif.c:
static int
type_run(const char *type)
{
udpif_run(backer->udpif);
|
|--unixctl_command_reply() // handles upcall
if (backer->recv_set_enable) {
udpif_set_threads(backer->udpif, n_handlers, n_revalidators);
}
if (backer->need_revalidate) {
// revalidate
udpif_revalidate(backer->udpif);
}
/* Check for and handle port changes dpif. */
process_dpif_port_changes(backer);
}
4.4. Bridge Processing
TODO: this section needs to refine
In each loop, vswitchd also let each bridge handle all its affairs in
ofproto_run(). ofproto_run() is defined in vswitch/bridge.c:
int
ofproto_run(struct ofproto *p)
{
p->ofproto_class->run(p); // calls into ofproto-dpif.c for dpif class
if (p->ofproto_class->port_poll) {
while ((error = p->ofproto_class->port_poll(p, &devname)) != EAGAIN) {
process_port_change(p, error, devname);
}
}
if (new_seq != p->change_seq) {
/* Update OpenFlow port status for any port whose netdev has changed.
*
* Refreshing a given 'ofport' can cause an arbitrary ofport to be
* destroyed, so it's not safe to update ports directly from the
* HMAP_FOR_EACH loop, or even to use HMAP_FOR_EACH_SAFE. Instead, we
* need this two-phase approach. */
SSET_FOR_EACH (devname, &devnames) {
update_port(p, devname);
}
}
connmgr_run(p->connmgr, handle_openflow); // handles openflow messages
}
In the above, the bridge first calls the run() method of this ofproto class,
to let the ofproto class handle all its class-specific affairs. Then it proceeds
to the handling of port changes and OpenFlow messages.
For dpif, the run() method is implemented in ofproto/ofproto-dpif.c:
static int
run(struct ofproto *ofproto_)
{
if (ofproto->netflow) {
netflow_run(ofproto->netflow);
}
if (ofproto->sflow) {
dpif_sflow_run(ofproto->sflow);
}
if (ofproto->ipfix) {
dpif_ipfix_run(ofproto->ipfix);
}
if (ofproto->change_seq != new_seq) {
HMAP_FOR_EACH (ofport, up.hmap_node, &ofproto->up.ports) {
port_run(ofport);
}
}
if (ofproto->lacp_enabled || ofproto->has_bonded_bundles) {
HMAP_FOR_EACH (bundle, hmap_node, &ofproto->bundles) {
bundle_run(bundle);
}
}
stp_run(ofproto);
rstp_run(ofproto);
if (mac_learning_run(ofproto->ml)) {
ofproto->backer->need_revalidate = REV_MAC_LEARNING;
}
if (mcast_snooping_run(ofproto->ms)) {
ofproto->backer->need_revalidate = REV_MCAST_SNOOPING;
}
if (ofproto->dump_seq != new_dump_seq) {
/* Expire OpenFlow flows whose idle_timeout or hard_timeout has passed. */
LIST_FOR_EACH_SAFE (rule, next_rule, expirable,
&ofproto->up.expirable) {
rule_expire(rule_dpif_cast(rule), now);
}
/* All outstanding data in existing flows has been accounted, so it's a
* good time to do bond rebalancing. */
if (ofproto->has_bonded_bundles) {
HMAP_FOR_EACH (bundle, hmap_node, &ofproto->bundles)
if (bundle->bond)
bond_rebalance(bundle->bond);
}
}
}
4.5 Sum Up: bridge_run()
void
bridge_run(void)
{
/* step.1. init all needed */
ovsdb_idl_run(idl); // handle RPC; sync with remote OVSDB
if_notifier_run(); // TODO: not sure what's doing here
if (cfg)
dpdk_init(&cfg->other_config);
/* init ofproto library. This only runs once */
bridge_init_ofproto(cfg);
|
|--ofproto_init(); // resiter `ofproto/list` command
|
|--ofproto_class_register(&ofproto_dpif_class) // register default ofproto class
|--for (ofproto classes):
ofproto_classes[i]->init() // for ofproto_dpif_class, this will call the init() method in ofproto-dpif.c
/* step.2. datapath & bridge processing */
bridge_run__();
|
|--FOR_EACH (type, &types) /* Let each datapath type do the work that it needs to do. */
| ofproto_type_run(type);
|
|--FOR_EACH (br, &all_bridges) /* Let each bridge do the work that it needs to do. */
ofproto_run(br->ofproto);
|
|--ofproto_class->run()
|--connmgr_run(connmgr, handle_openflow) // handles messages from OpenFlow controller
/* step.3. commit to ovsdb if needed */
ovsdb_idl_txn_commit(txn);
}
4.6 Unixctl IPC Handling
In each loop of ovs-vswitchd, unixctl_server_run() will be called once.
In this method, the unixctl server first accepts connctions from IPC clients,
then processes requests from each connection.
void
unixctl_server_run(struct unixctl_server *server)
{
// accept connections
for (i = 0; i < 10; i++) {
error = pstream_accept(server->listener, &stream);
if (!error) {
conn->rpc = jsonrpc_open(stream);
} else if (error == EAGAIN) {
break;
}
// process requests from each connection
LIST_FOR_EACH_SAFE (conn, next, node, &server->conns) {
run_connection(conn);
|
|--jsonrpc_run()
| |--stream_send()
|--jsonrpc_recv(conn_rpc, &msg)
|--assert(msg.type == JSONRPC_REQUEST)
|--process_command(conn, msg) // format the received text to desired output
|--registerd unixctl command callback
}
}
TODO: add an example
4.7. netdev run
In netdev_run(), vswitchd loops over all the network devices, and updates
the netdev information of any of them changed (e.g. mtu, src/dst mac).
The netdev processing in each loop is as follows:
/* Performs periodic work needed by all the various kinds of netdevs.
*
* If your program opens any netdevs, it must call this function within its
* main poll loop. */
void
netdev_run(void)
{
netdev_initialize();
struct netdev_registered_class *rc;
CMAP_FOR_EACH (rc, cmap_node, &netdev_classes) {
if (rc->class->run)
rc->class->run(rc->class);
}
}
struct netdev is a generic abstraction of network devices, defined in
lib/netdev-provider.h:
/* A network device (e.g. an Ethernet device).
*
* Network device implementations may read these members but should not modify
* them. */
struct netdev {
char *name; /* Name of network device. */
struct netdev_class *netdev_class; /* Functions to control this device. */
...
int n_txq;
int n_rxq;
int ref_cnt; /* Times this devices was opened. */
struct shash_node *node; /* Pointer to element in global map. */
};
Each specific type of network device needs to implement the methods in struct
netdev_class, e.g. there are implementations for BSD, linux, DPDK. These
implementations are in lib/netdev_xxx.c.
struct netdev_class {
const char *type; /* Type of netdevs in this class, e.g. "system", "tap", "gre", etc. */
bool is_pmd; /* If 'true' then this netdev should be polled by PMD threads. */
/* ## Top-Level Functions ## */
int (*init)(void);
void (*run)(const struct netdev_class *netdev_class);
void (*wait)(const struct netdev_class *netdev_class);
/* ## netdev Functions ## */
int (*construct)(struct netdev *);
void (*destruct)(struct netdev *);
...
int (*rxq_recv)(struct netdev_rxq *rx, struct dp_packet_batch *batch);
void (*rxq_wait)(struct netdev_rxq *rx);
};
rc->class->run(rc->class) will run into specific implementations, for linux
netdevs, it will call into netdev_linux_run() in lib/netdev_linux.c. And
what it does in the callback is detecting linux network device changes through
netlink, e.g. mtc, src/dst mac changes, and updates these changes to
corresponding netdev:
static void
netdev_linux_run(const struct netdev_class *netdev_class OVS_UNUSED)
{
if (netdev_linux_miimon_enabled())
netdev_linux_miimon_run();
/* Returns a NETLINK_ROUTE socket listening for RTNLGRP_LINK,
* RTNLGRP_IPV4_IFADDR and RTNLGRP_IPV6_IFADDR changes */
sock = netdev_linux_notify_sock();
do {
error = nl_sock_recv(sock, &buf, false); // receive from kernel space
if (!error) {
if (rtnetlink_parse(&buf, &change)) {
netdev_linux_update(netdev, &change);
| // update netdev changes, e.g. mtu, src/dst mac, etc
|- netdev_linux_changed(netdev, flags, 0);
}
} else if (error == ENOBUFS) {
netdev_get_devices(&netdev_linux_class, &device_shash);
SHASH_FOR_EACH (node, &device_shash) {
get_flags(netdev_, &flags);
netdev_linux_changed(netdev, flags, 0);
}
}
} while (!error);
}
Netlink socket family is a Linux kernel interface used for IPC between both the kernel and userspace processes, and between different userspace processes. Similarly to the Unix domain sockets, and unlike INET sockets, Netlink communication cannot traverse host boundaries. However, while the Unix domain sockets use the file system namespace, Netlink processes are addressed by process identifiers (PIDs). Netlink is designed and used for transferring miscellaneous networking information between the kernel space and userspace processes[3].
Summary
-
ovs-vswitchdflow diagramFig.3.1 vswitchd flow diagram
-
ovs-vswitchditeraction with other modulesFig.4.1 vswitchd internal modules
-
Implementation terms
ofproto: ovs bridgeofproto provider: interface to manage an specific OpenFlow-capable software/hardware switchofproto-dpif- the built-in ofproto provider implementation in OVSdpif- a library servers forofproto-dpifnetdev- generic abstraction of network devicesnetdev-provider- interface to OS- and platform-specific network devices