[译] HDD 是如何工作的:旋转硬盘内部结构与工作原理的动画展示(2022)
译者序
本文翻译自 2022 年 Branch Education 的一个科普视频 How do Hard Disk Drives Work? (Youtube), 强烈推荐观看原视频(上不了油管的,B 站也有搬运)。本文整理个图文版方便查阅与思考,
水平及维护精力所限,译文不免存在错误或过时之处,如有疑问,请查阅原视频。 传播知识,尊重劳动,年满十八周岁,转载请注明出处。
以下是译文。
原视频由 PCBWay 赞助,感谢赞助商。
1 硬盘拆解
1.1 盘片(platter)
盘片是存储数据的地方,
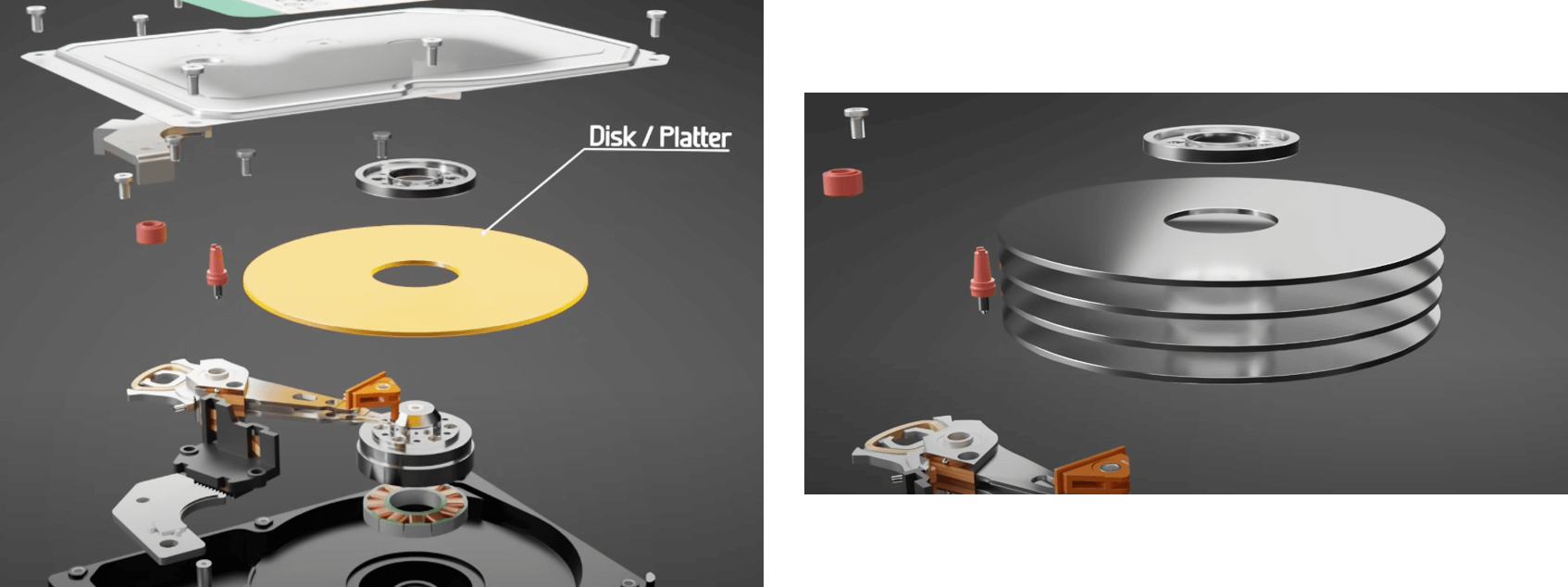
Disk/platter
- 根据存储容量的不同,硬盘可能会有多个盘片堆叠,如上面右图所示;
-
磁盘由铝镁合金(aluminum magnesium alloy)和其他合金的多个涂层组成,
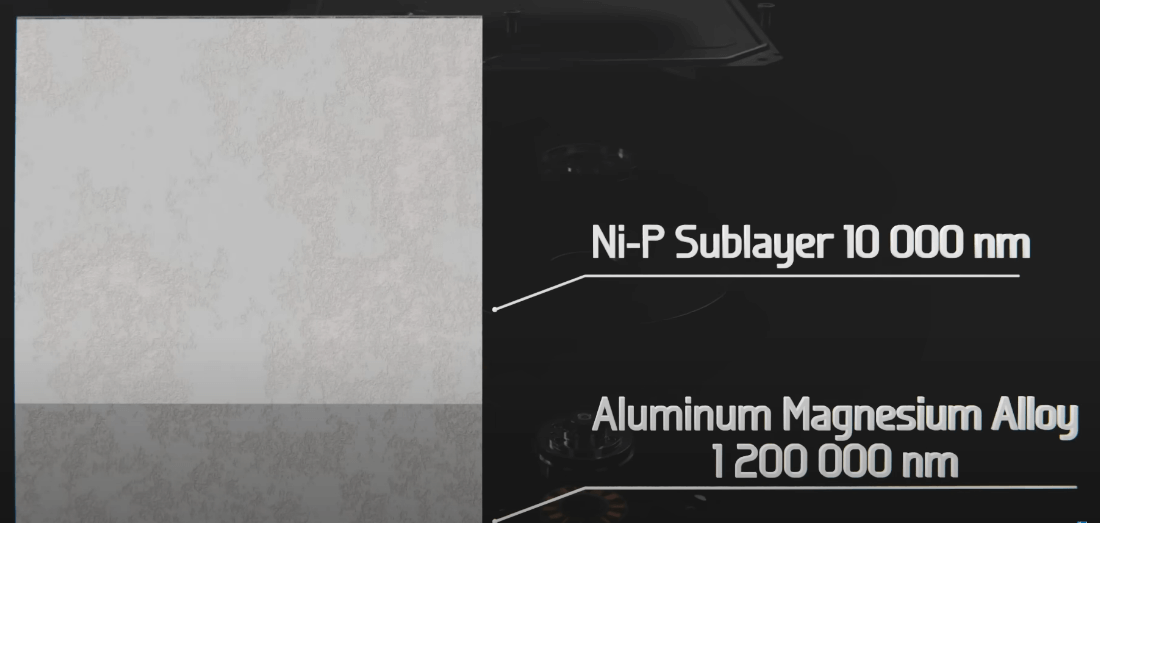
Disk/platter
-
磁性功能层是
120nm的钴铬钽合金薄层(cobalt chromium tantalum alloy), 它由磁性微块组成,磁极方向能变,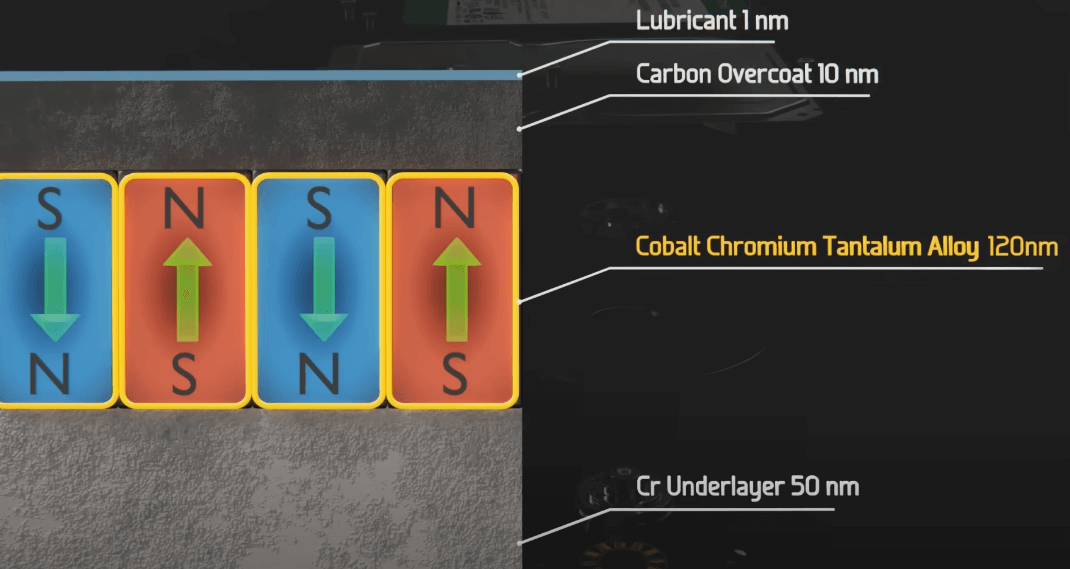
Disk/platter
- 盘片安装在主轴上,主轴使用中心的无刷直流电机(brushless DC motor)以
7200rpm的等速度旋转。
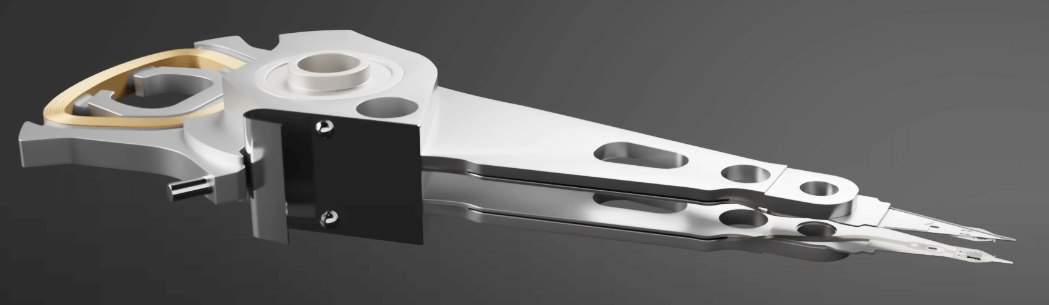
1.2 机械臂装置
机械臂装置包括好几个组成部分,分别来看下。
1.2.1 机械臂(arm)
每个盘(platter)上下各有一个臂(arm),
1.2.2 滑橇(slider)和读写头(read/write head)
每个臂的末端有一个称为 slider(滑橇、滑块)的模块,它里面又包括了一个读/写头 (注意,读头和写头是分开的两个部件,后面会详细介绍),
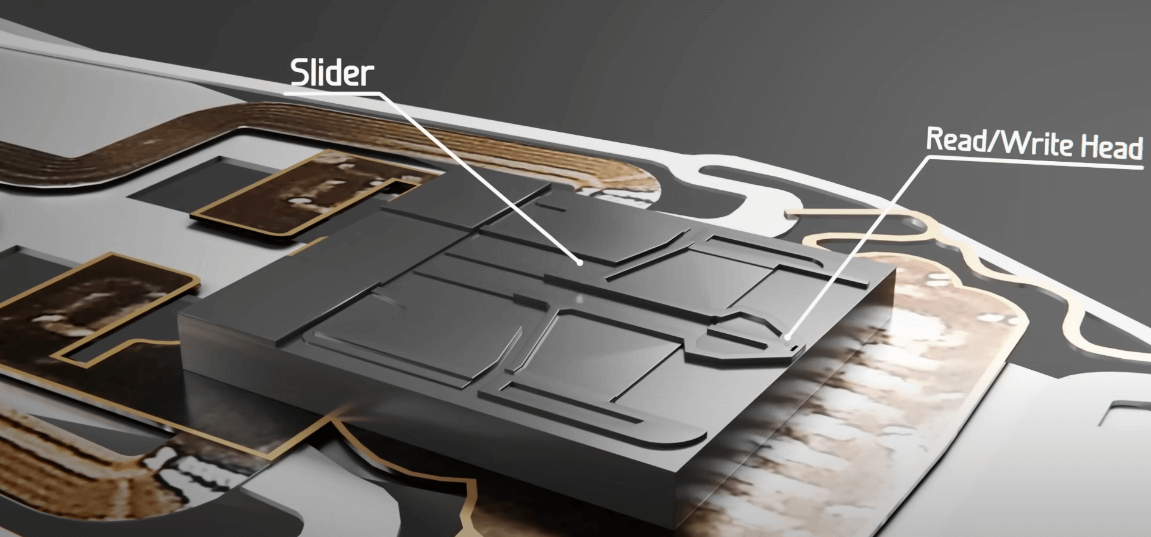
磁盘高速旋转产生的气流能使这个滑块(和读写头)浮起来,
稳定运行在离磁盘表面 15nm(约 100 个原子)的地方,如下面的动图所示,

Fig. 高速旋转的盘片产生的气流使滑橇和读写头飘起来
1.2.3 读写头停靠装置
只有当盘片全速旋转时(有数据读写任务),机械臂才会转到磁盘表面上。 平时盘片不旋转时(没有读写任务),机械臂会停在磁盘边上的一个小塑料装置上。

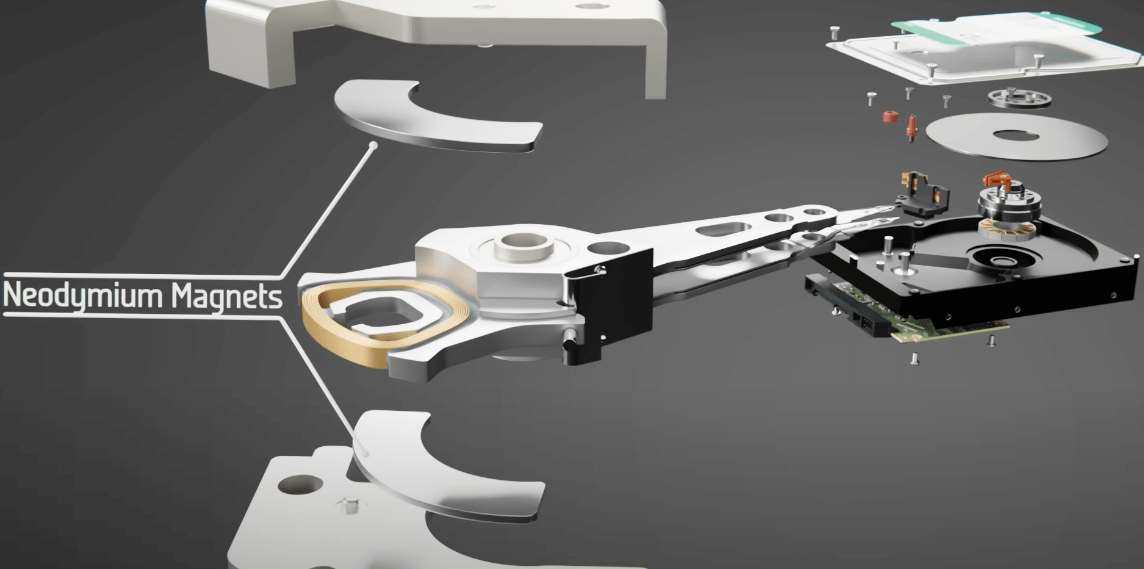
1.2.4 尾部音圈电机(马达)
机械臂的尾部有一个 音圈电机(voice coil motor),或称音圈马达,它由线圈(coil of wire)和上下两个强钕磁铁(strong neodymium magnets)组成,
VCM(Voice Coil Motor)一种特殊形式的直接驱动电机,原理和扬声器类似,固得名。 通电线圈在磁场内就会产生力,力的大小与施加在线圈上的电流成比例,运动轨迹可以是直线也可以是弧线。 具有结构简单、体积小、速度快、响应快等特点。译注。
线圈通电之后会产生一个力,使机械臂在磁盘上移动(可以正向也可以反向),
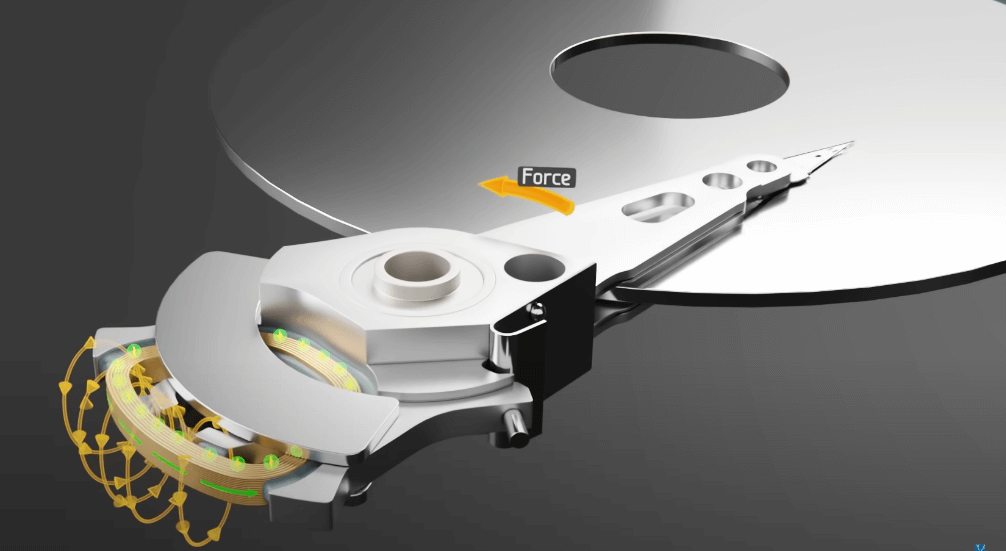
这种马达的速度和精度:
- 速度:读/写头能够在不同磁道上来回移动 ~20 次/秒;
- 精度:读/写头位置精度
~30nm。
1.3 机械臂-电路板之间的数据线
如下图所示,一条柔性电线(a flexible ribbon of wires)沿着机型臂的侧面布线,

- 一边连接到读/写头,
- 一边连接到一个连接器(connector),该 connector 进一步连接到硬盘的主板,或称印刷电路板(PCB)。
1.4 PCB 和上面的芯片
PCB 上面的东西如下图所示,
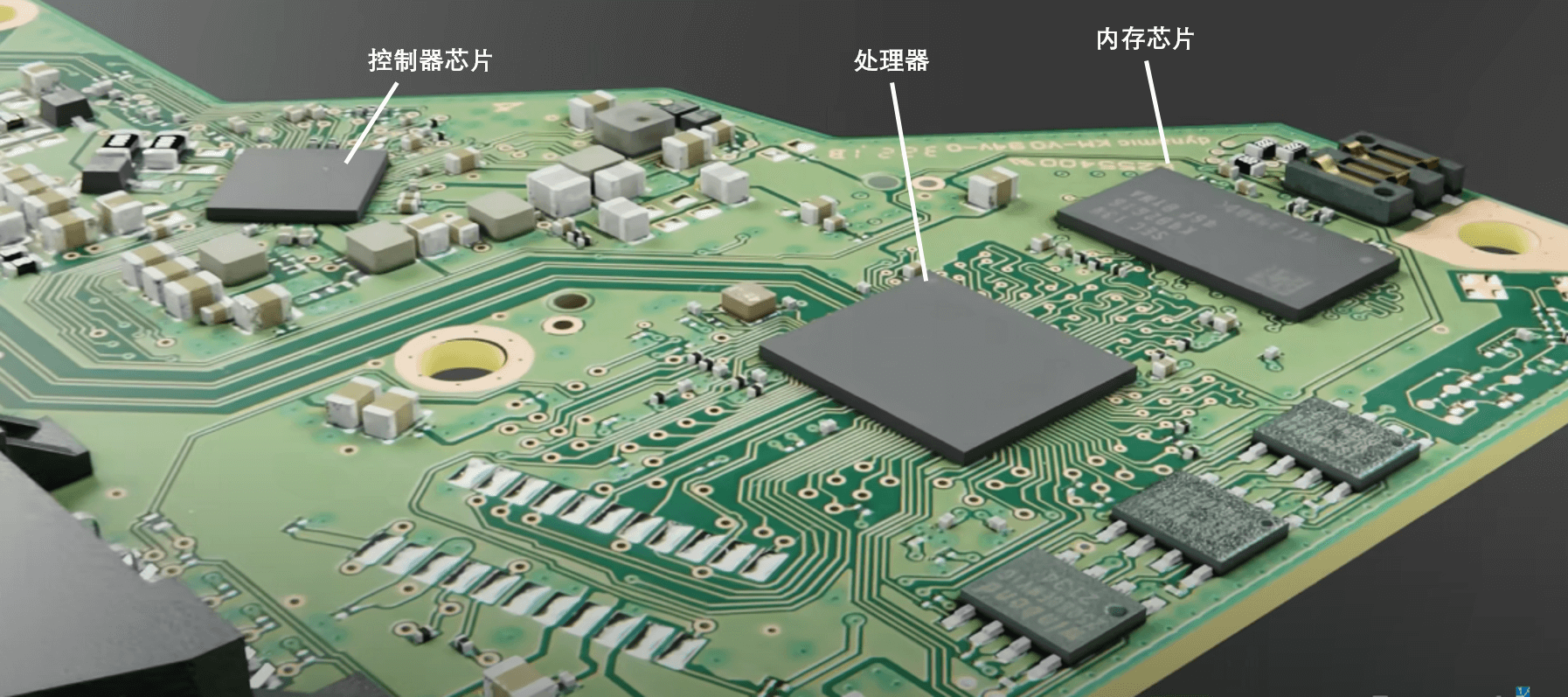
这里主要介绍三个芯片:
- 主处理器芯片;
- 内存芯片,作为主处理器的 cache;
- 控制音圈马达和磁盘主轴电机的芯片。
1.5 数据线接口(e.g. SATA)和电源线接口
PCB 边缘还有两个硬件接口,

- 数据接口:例如 SATA 接口,用于和电脑主板相连传输数据;
- 电源接口:用于给 HDD 供电。
1.6 防尘装置
再看一下硬盘的两个防尘装置,
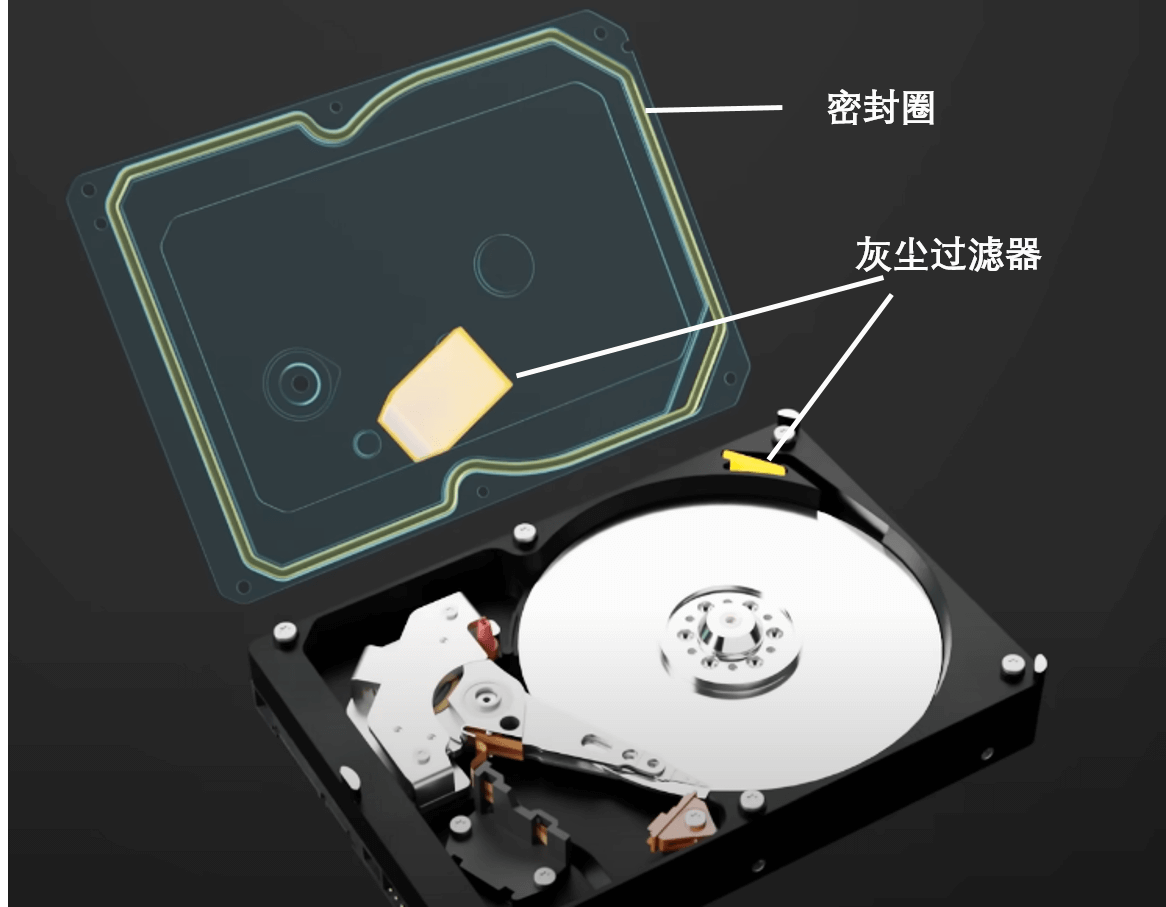
- 垫圈:将磁盘密封起来;
- 灰尘过滤器:用于捕获灰尘颗粒。
密封和过滤都是非常必要的,因为读写头距离盘片仅 15nm,
而灰尘颗粒的大小可达 10,000nm,
如果与 7200rpm 高速旋转磁盘碰撞,可能会造成严重损坏,
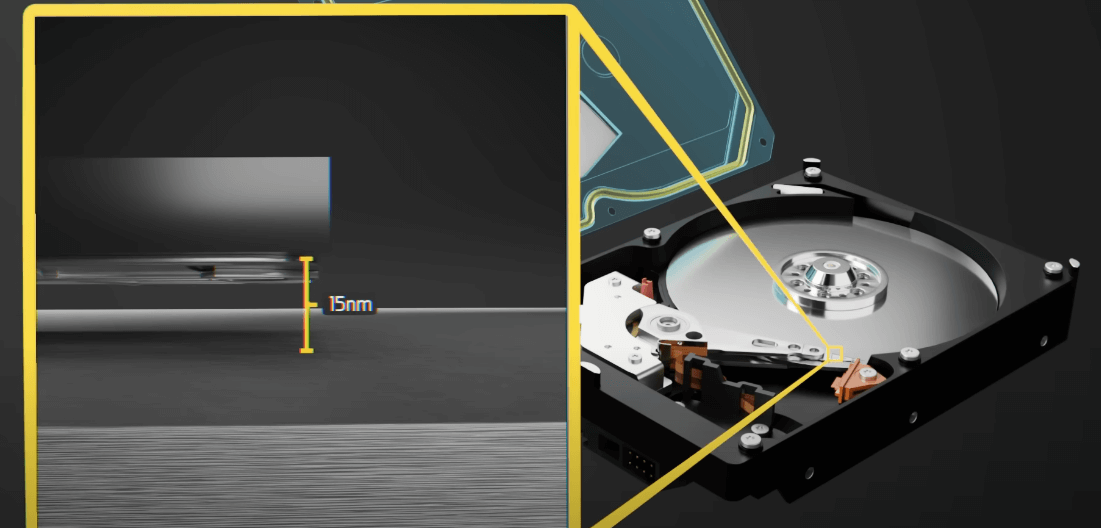
Fig. 读写头正常运行时,距离盘片仅 15nm。
2 盘片的微观组成
了解了粗粒度的硬件构成之后,现在让来深入到盘片的内部,看看它的微观组成。
2.1 磁盘(disk) -> 磁道(track)
首先,每个磁盘以同心圆的方式分割为多个磁道(concentric circles of tracks),

Fig. 磁盘分割为大量磁道。
每个磁盘的磁道数量能达到 500,000 个甚至更多。
2.2 磁道(track) -> 扇区(sector)
然后,沿着直径的方向,所有磁道又被分割为多个扇区,
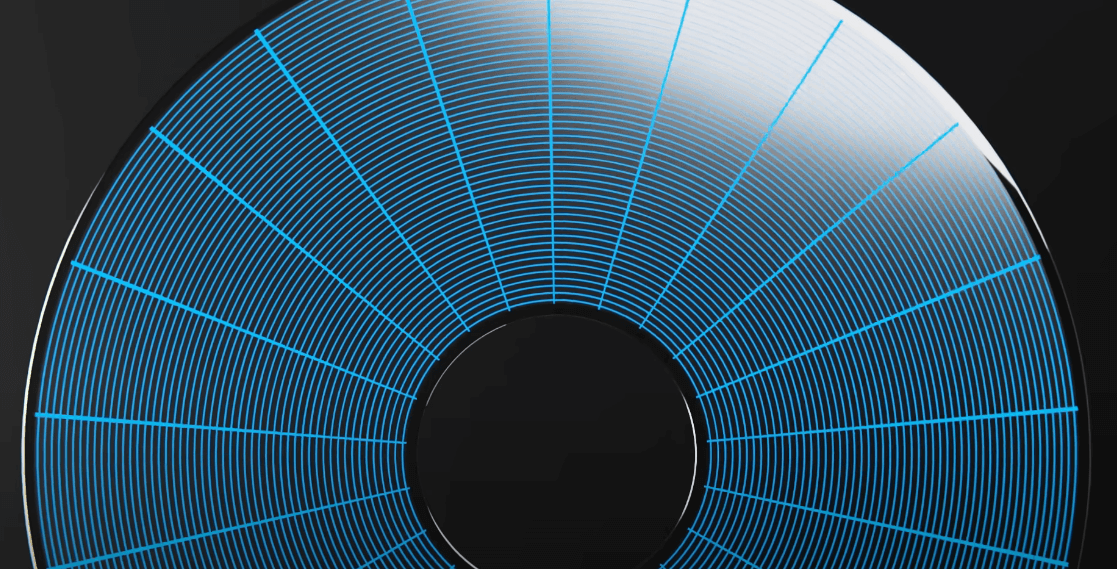
Fig. 磁道进一步分割为扇区。
2.3 扇区内
现在看一下每个扇区内的结构,
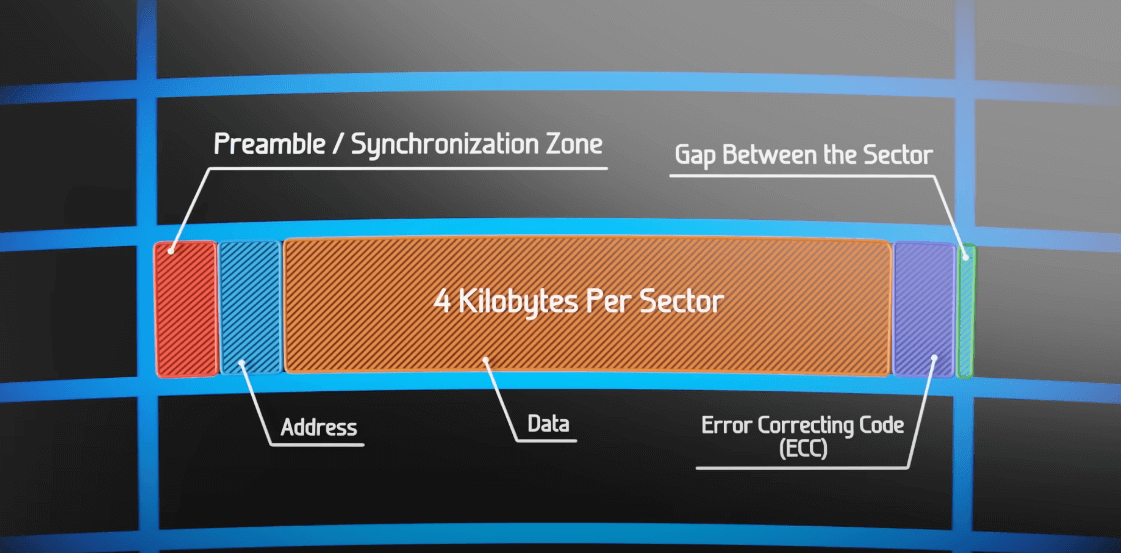
Fig. 每个扇区的内部结构。
如上图所示,每个扇区中,依次包含五部分。
2.3.1 前导/同步区(preamble or synchronization zone)
记录这个旋转磁盘的确切速度和每个比特位的长度(length of each bit of data)。
2.3.2 地址区
帮助读/写头确定当前位于哪个磁道和扇区。
2.3.3 数据区
扇区大小
扇区的大小因盘而异,例如老一些的盘是 512 字节或 2KB,新一些的通常是 4KB。
查看磁盘扇区大小(译注)
有很多工具可以查看,lsblk 指定显示磁盘名字、物理扇区大小和逻辑扇区大小:
$ lsblk -o NAME,PHY-SeC,LOG-SeC
NAME PHY-SEC LOG-SEC
sda 4096 512 # 这块是 SATA SSD
sdb 512 512 # 这块是 SATA HDD
fdisk -l,这个命令好记:
$ fdisk -l
Disk /dev/sdb: 2.18 TiB, 2399276105728 bytes, 4686086144 sectors
Disk model: XXX # 硬盘型号
Units: sectors of 1 * 512 = 512 bytes # 当前扇区大小
Sector size (logical/physical): 512 bytes / 512 bytes # 逻辑值 & 物理支持的最大值
I/O size (minimum/optimal): 512 bytes / 512 bytes
iostat 磁盘读写带宽(译注)
可以通过 cat /proc/diskstats
查看磁盘的读写情况,其中就包括了每个磁盘已经读写的 sectors 数量:
$ cat /proc/diskstats
# r_sectors w_sectors
8 0 sda 31663 10807 2928442 8471 203024 106672 6765800 ...
这个数量乘以 sector 大小,就是已经读写的字节数,iostat 等工具显示的磁盘读写带宽,就是根据这个来计算(估算)的。
一个扇区只会属于一个文件(译注)
根据 wikipedia Disk sector, 对于绝大部分文件系统来说,任何一个文件都是占用整数个扇区的 —— 也就是说一个扇区只会属于一个文件, 如果没用满,后面的就空着。所以在调整扇区大小时,这是一个需要考虑的因素。
扇区与 block 的关系(译注)
这里说的 block 是文件系统的概念,比如常见的一个 block 是 4KB,如果磁盘格式化的时候,扇区大小选择的 512B,那一个 block 就对应 8 个扇区。 对操作系统屏蔽了底层的硬件细节。
2.3.4 纠错码(ECC)区
Fig. 每个扇区的内部结构。
用于校验存储在块中的数据。
2.3.5 扇区之间的间隔区
给了读/写磁头一定的容错能力。
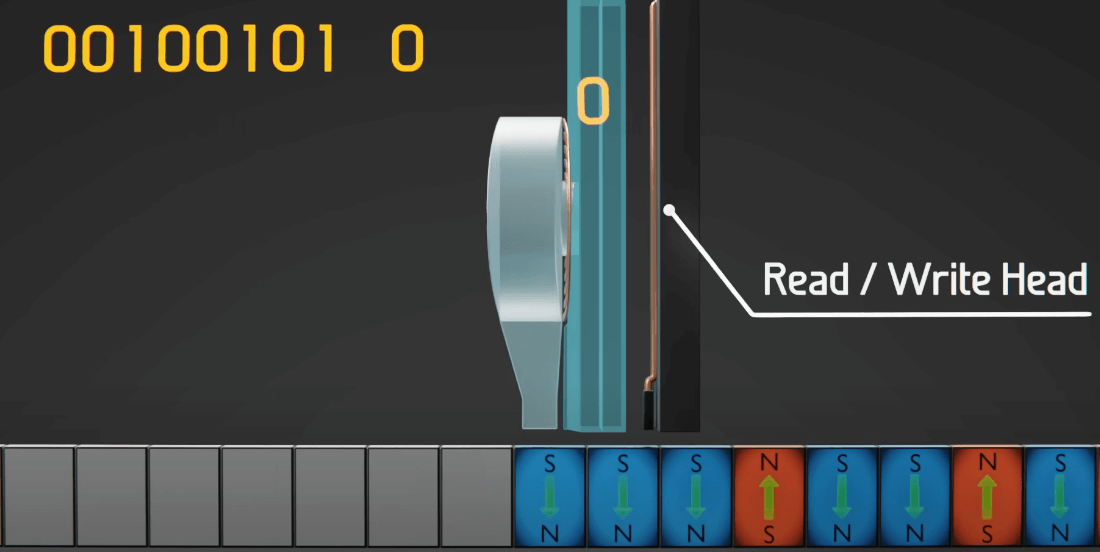
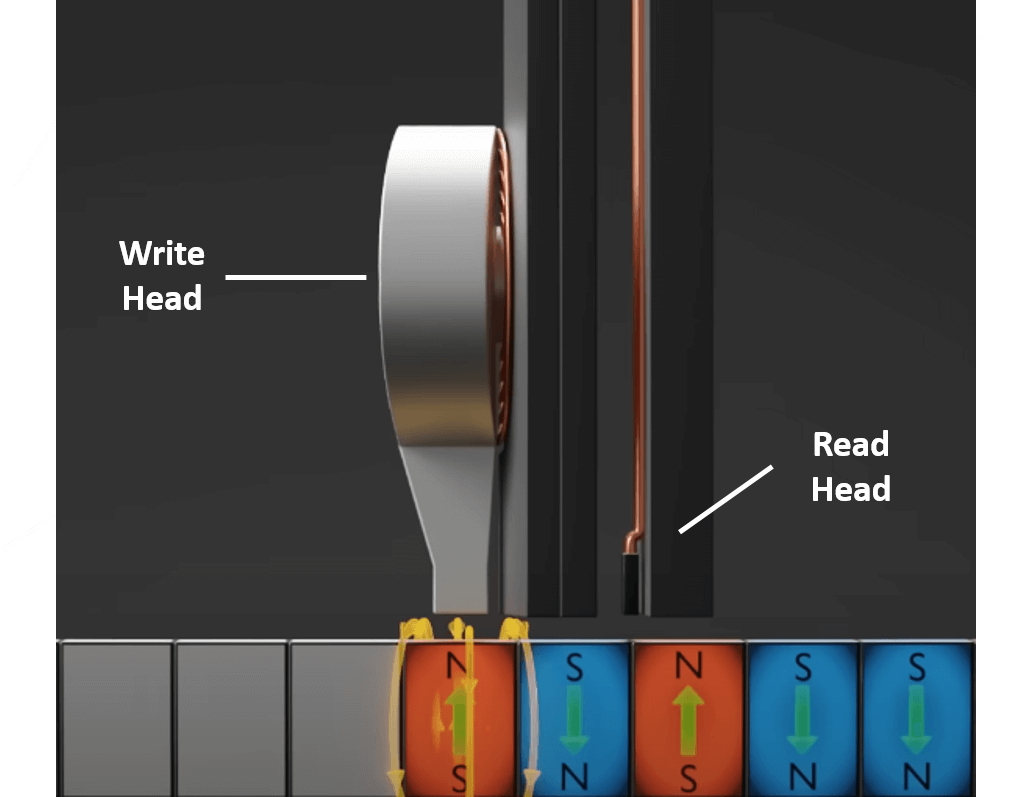
3 写数据
现在让我们进一步看看读/写磁头的内部机制,以及写头(write head)是是如何写数据的。
3.1 磁场微块和磁化
扇区是由一个个磁场微块组成的, 写头通过改变磁盘微块的磁化方向来实现数据写入,
每个磁盘微块大小约为 90nm x 100nm x 125nm,

磁化之外,微块内原子的南北极是随机的; 磁化之,微块所有原子的北南极都指向同一方向,
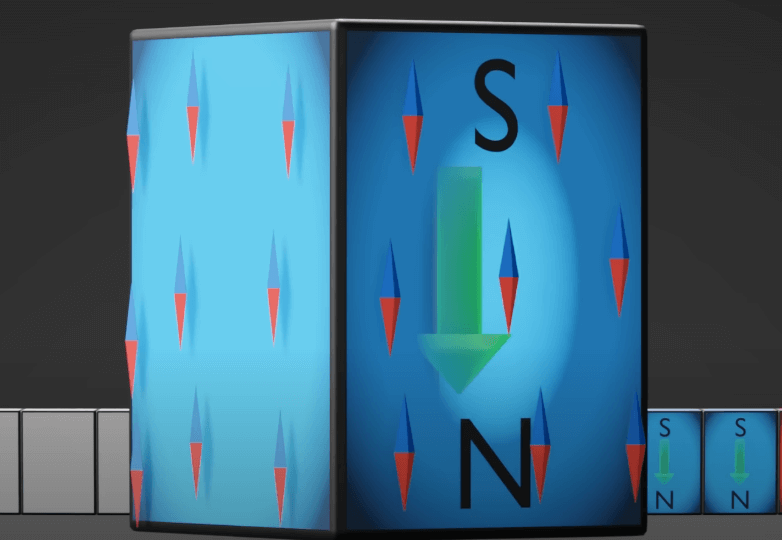
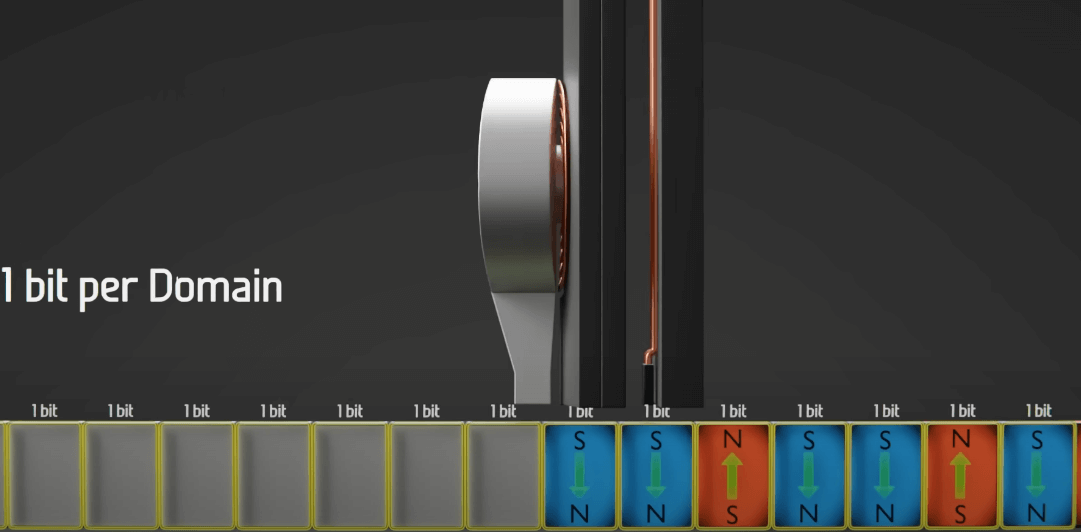
每个微块对应的就是一个 bit 数据,
3.2 写入 1bit 的过程
下面具体看一下如何磁化一个微块(相当于写入 1bit 数据)。
电流施加到 write head 的线圈之后,就会在此处产生一个强磁场,

这个磁场沿着 write head 向下,聚焦到尖端的一个小点,改变它正下方的磁盘微块极性
(中间的缝隙就是前面提到过的读写头 15nm 悬浮高度),
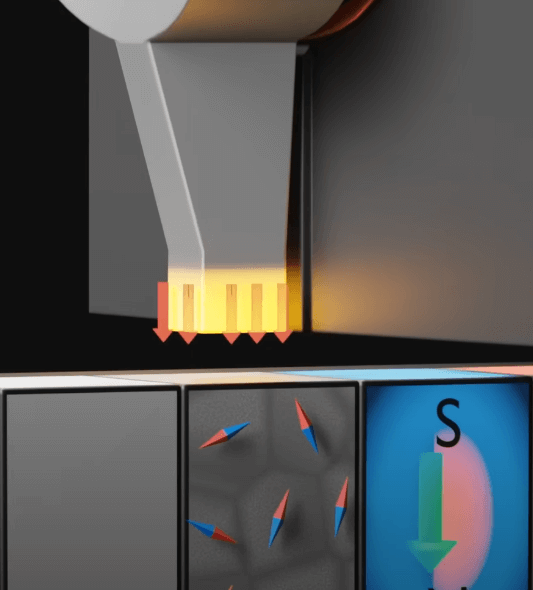
磁化之后的微块变成永磁体,能保持这个状态很多年,也就是数据已经持久化, 以后可以重复用读头感应这个永久磁场,读出存储的数据。
3.3 覆盖写
原理跟上面一样,也是逐 bit 来。 如果新写入的 bit 跟已经存储的一样,磁极就不变,否则就改变一下方向。
4 读数据
再来看看如何从磁盘读数据。
4.1 如何表示 0 和 1
4.1.1 不是用南北极指向表示
前面我们假设了不同南北极的磁块分别表示 0 和 1,

这在概念上非常简单,但实际实现并非如此。
4.1.2 用南北极指向的变化表示
实际的 read head,检测的是相邻两个微块的磁极变化, 这是因为磁极变化的强度比单个微块的磁场强度要大得多,所以这种方式的检测准确率非常高。
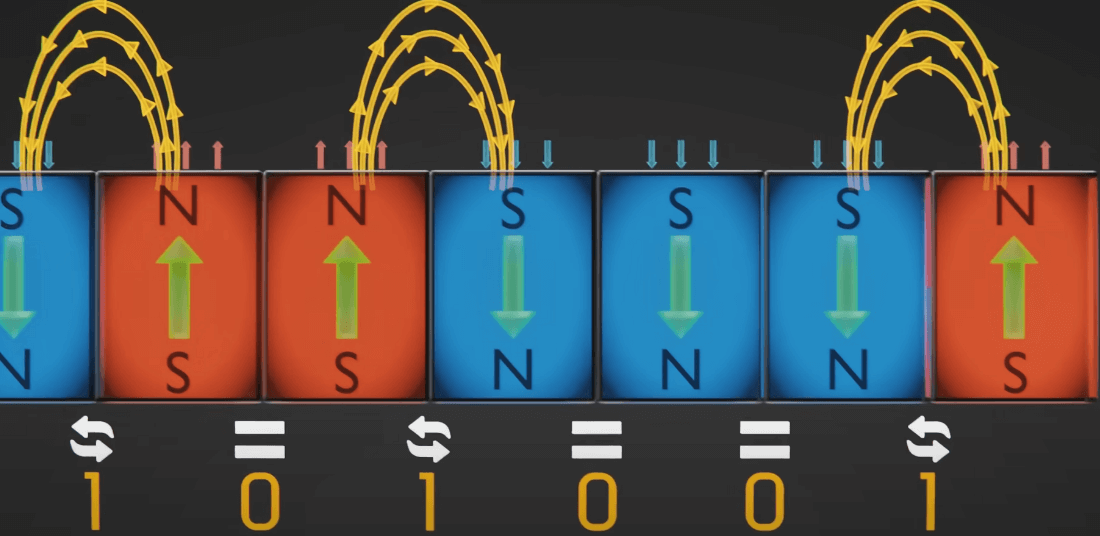
所以,如上图所示,
- 相邻微块磁场方向变化,表示 1;
- 相邻微块磁场方向不变,表示 0。
4.2 读头(read head)内部结构
那么,检测这些磁场的读头内部结构是怎样的呢?
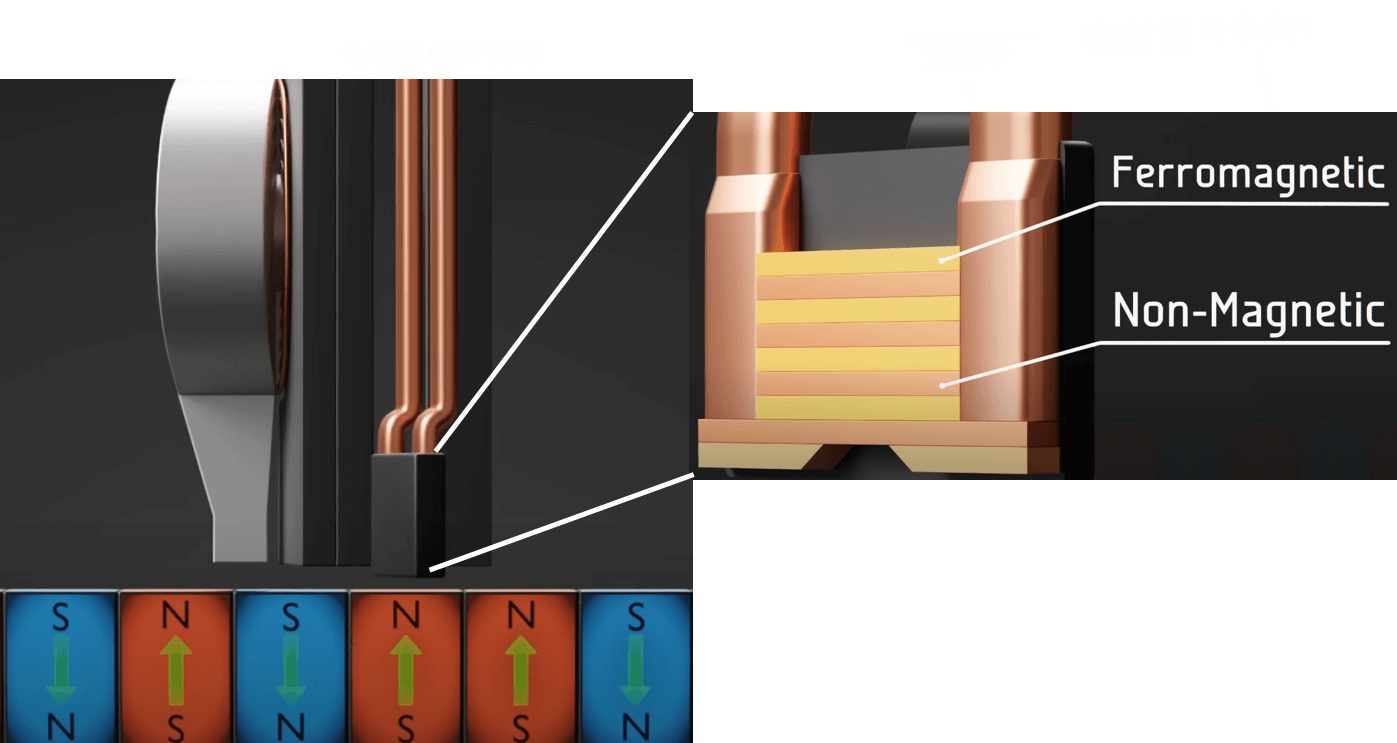
如上图所示,
- 读头里面是多层导电材料,由铁磁材料和非磁性材料的交替组成。
- 这种多层材料具有一种称为巨磁阻(giant magnetoresistance,
GMR)的特性, 简单来说,穿过它的磁场强度发生变化时,它的电阻率就会变化。
4.3 读取数据:GMR 和读头电阻率
基于 GMR 特性,根据读头的电阻率就能判断下面存储的 0 还是 1,

- 电阻率较低时,表示读取头下方磁场变化强,对应存储的是 bit
1; - 电阻率较高且无磁场时,对应存储的是 bit
0。
4.4 连续 0 的问题
以上过程有一个问题:如果较长连续区域的磁极都一样,对应的就是一长串的 0,由于读头的精度,有可能会导致多读或少读几个 0,导致数据错乱。
解决方少:利用每个 sector 的前导区和纠错码区中的信息。
5 致谢
原作者 Branch Education 感谢所有个人赞助者和会员赞助商,让他们制作了如此精良的科普视频。
6 Linux 存储相关的子系统和软件栈(译注)
6.1 从进程 read/write 请求到 HDD 读写数据
来自 Linux Storage Stack Diagram,
涵盖了 3.x ~ 6.x 多个内核版本,这里先贴一个 3.x 的,因为简单,
方便看出从用户进程发出 read/write 请求到 HDD 读写数据的内核模块链路:

虚拟文件系统(VFS)里面分为几类:
- 常规文件系统(ext4, xfs, btrfs, …);
- 网络文件系统(NFS, CIFS, …);
- 伪文件系统(procfs, sysfs, …);
- 特殊文件系统(tmpfs, devtmpfs, …)。
再贴一个 kernel v6.9 的,
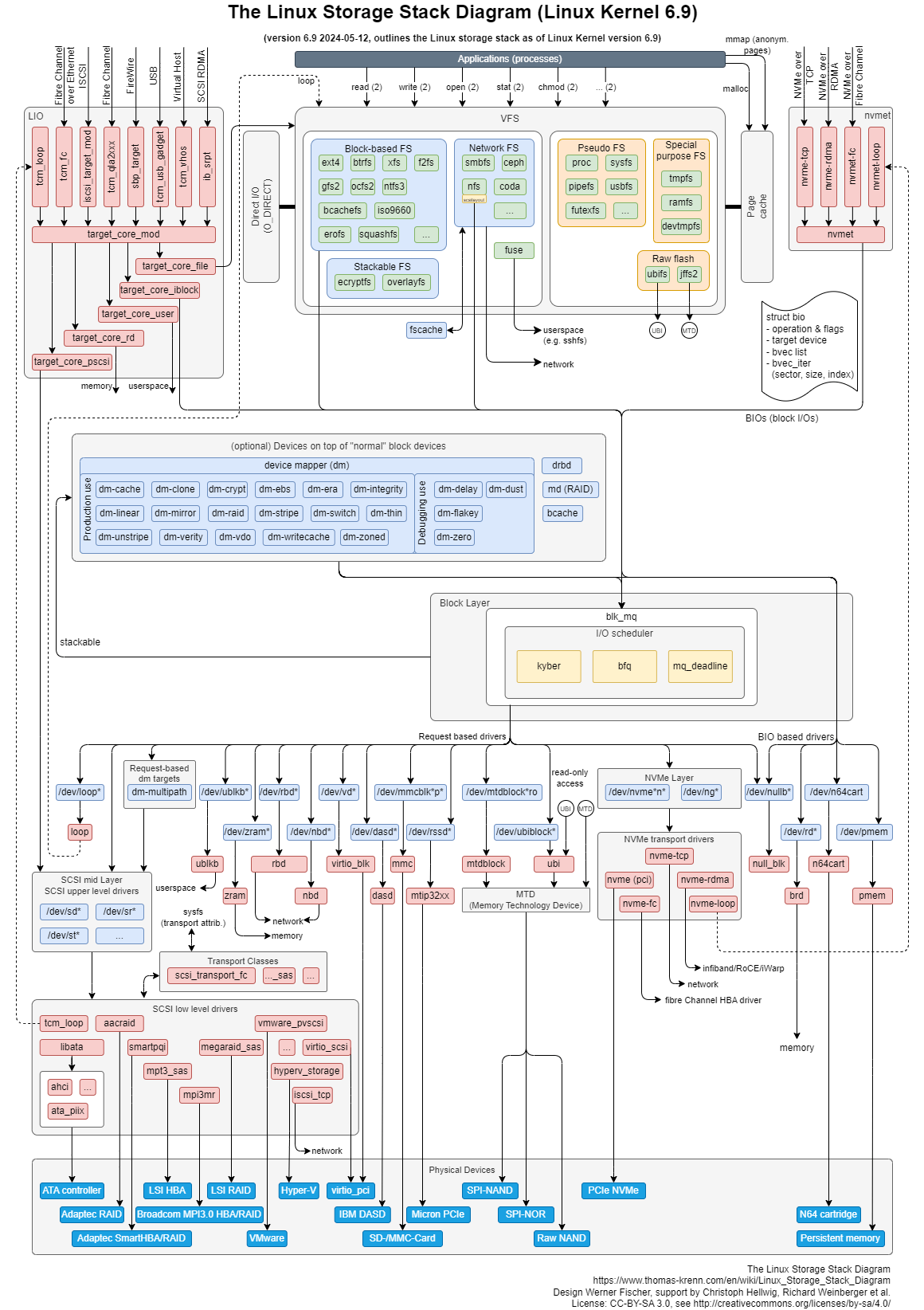
6.2 内核 block layer 深入解读
- A block layer introduction part 1: the bio layer, LWN.net, 2017
- A block layer introduction part 2: the request layer, LWN.net, 2017
6.3 其他优质文章
-
How does a hard drive work, https://www.explainthatstuff.com/, 2024
除了硬件拆解和介绍工作原理,还对比了 HDD 和 SDD,并且更重要的,介绍了 IBM 发明硬盘的历史。
-
How a Hard Drive Works, cs.stanford.edu, 2012
斯坦福的一个老师实物教学,开盖展示读写数据时,硬盘的工作过程(然后这个盘就报废了)。
-
HDD from Inside: Hard Drive Main Parts, https://hddscan.com/
硬件拆解部分比本文更详细,想了解更多硬件细节的,可作为补充。
![]()
![]()